Les quadrilatères de Lambert sont des quadrilatères ayant 3 angles droits. On s’intéresse ici au cas où l’angle non droit est une diviseur de 360° pour envisager un pavage par ces quadrilatères. On terminera par le cas où l’angle aigu est nul.
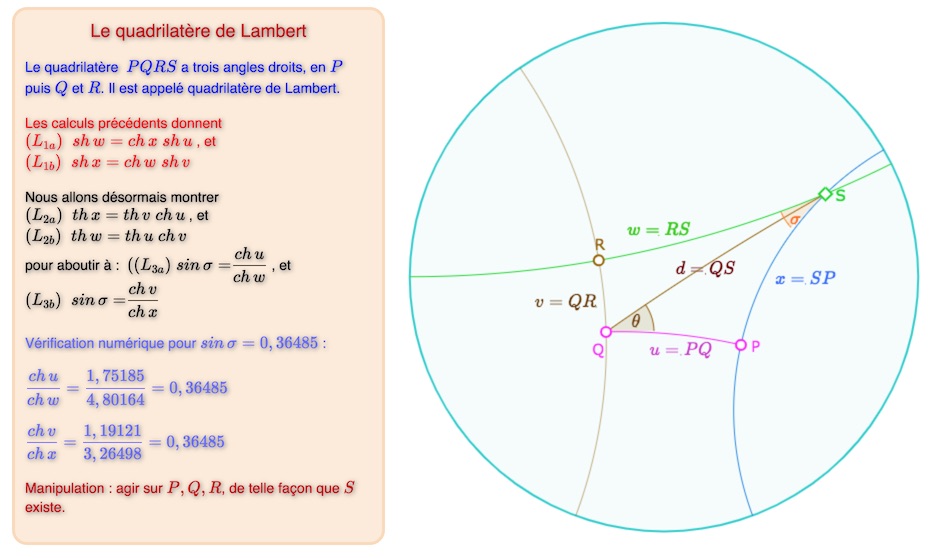
Nous avons déjà étudié ce quadrilatère dans l’article sur le théorème de Engel. Voici les principaux résultats que nous allons réutiliser :
Ouvrir éventuellement cette figure dans un nouvel onglet.
Le calcul était alors centré sur l’angle \(\sigma\) en \(S\), qui donnait une relation entre les côtés opposés du quadrilatère. Mais si on veut se donner un angle aigu, a priori, au quadrilatère de Lambert, il faut alors injecter autour de cet angle aigu, que l’on notera désormais \(\theta\), une relation entre les trois côtés, comme \((L_{2b}) : th x = th v \; ch u\).
Un quadrilatère de Lambert
d’angle aigu donné
Avec les relations usuelles de trigonométrie hyperbolique, on arrive alors rapidement, en plus de la relation \(ch v = ch x \; sin \theta\), à \(ch u = \displaystyle \sqrt{\frac{ch^2 v -sin^2 \theta}{ch^2 v -1}}\).
Pour la construction, on se donne deux points \(S\) et \(P\), et, depuis la longueur \(SP\) on calcule les autres longueurs en fonction de l’angle en \(S\) voulu. voici ce que cela donne avec un curseur pour l’angle latex]\theta[/latex]. Attention : quand on agit sur le curseur de l’angle, il faut parfois déplacer \(P\) ou \(S\) pour que les cercles existent.
Préférer ouvrir cette figure https://lc.cx/QD_Lambert_curseur (plus grande) dans un nouvel onglet.
Génération 1 pour un pavage
autour de S pour \(\theta=45°\) ou \(\theta=60°\)
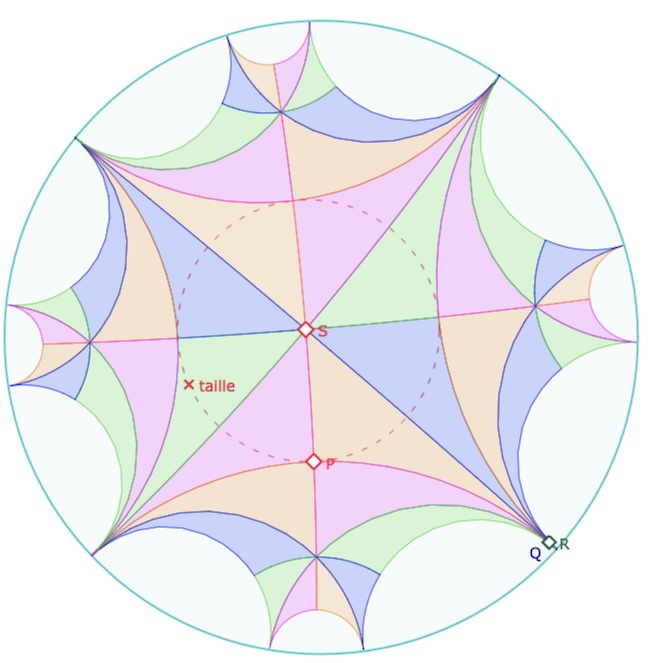
On s’intéresse a priori à trois angles en \(S\), à savoir : 45°, 60°, et 72° pour avoir autour de \(S\) respectivement 8, 6 ou 5 quadrilatères de Lambert isométriques. Commençons par regarder où l’angle en \(S\) est de 45° ou de 60° pour observer quelques propriétés de la figure. Pour cela, on se donne un point \(taille\) et le point \(P\) est sur le cercle hyperbolique de centre \(S\) et passant par ce point \(taille\). Cela permet d’observer les points qui a priori sont sur ce cercle et ceux qui n’y sont pas. Avant de manipuler la figure, voici une copie d’écran de la situation.
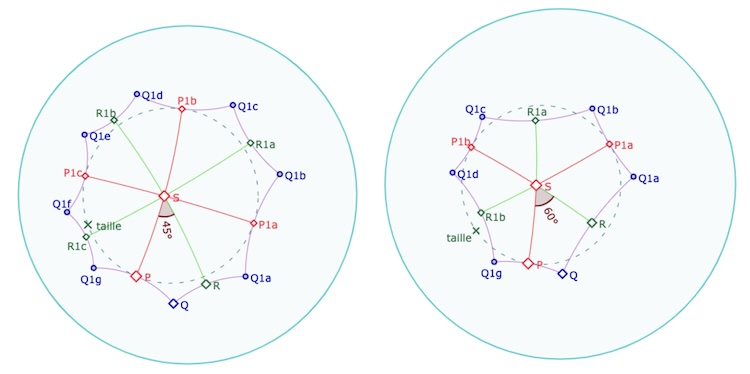
Partant du quadrilatère initial \(SPQR\), on construit ses symétriques. Et donc, les symétriques \(P_{1x}\)de \(P\) sont sur le cercle initial, mais pas les points \(Q_{1k}\). Les points \(R_{1x}\), en général, eux aussi ne sont pas sur le cercle. Sur l’illustration précédente, ils sont à l’extérieur à gauche et à l’intérieur à droite, mais cela dépend du rayon du cercle géré pour le point. \(taille\). Il y a ainsi une infinité de tels pavages quand il y a un nombre pair de quadrilatères comme les deux cas précédents, mais ce n’est pas le cas s’il y a un nombre impair de quadrilatères autour de \(S\). Si on veut en placer 5 (pour un angle aigu de 72°), le dernier sommet serait le point \(R_{1b}\) qui devrait être sur le cercle pour coïncider avec le point \(P\). On est donc amené à chercher à quelle condition les points \(R_{1x}\) sont sur le cercle initial. C’est le cas pour un seul rayon de ce cercle, rayon qui peut être calculé avec les relations dans le triangle rectangle déjà présentées dans l’article sur les pavages constructibles.
Les formules autour du triangle rectangle montrent que, dans le cas général, \(SR=SP\), pour le rayon du cercle initial \(SR = \displaystyle \frac{1}{\sqrt{2}sin \, \frac{\theta}{2}}\). Dans la figure suivante c’est réalisé pour les deux angles au centre de 45° et 60°, ce qui donne un rayon du cercle initial égal à \(\displaystyle \frac{2}{\sqrt{4-2\sqrt{2}}}\) pour 45° et simplement \(\sqrt{2}\) pour 60°.
Pour obtenir ce cas très particulier, le point \(taille\) est aimanté par ces deux cercles, mais seulement à 2 pixels pour que la figure reste fluide. Il faut donc s’en rapprocher pour que la figure accroche le cercle solution (caché). C’est validé dans le widget de présentation par l’affichage des longueurs \(SP\) et \(SR\). D’une manière générale, on déplace les points \(S, taille\) et \(P\) sur le cercle.
En déplaçant \(S\) on peut passer par un cercle où \(SR=SP\) et l’aimantation maintient alors l’égalité si on déplace \(S\) lentement. Il faut à nouveau manipuler le point \(taille\) pour sortir de ce cas particulier.
Quand on change d’angle, selon le contexte – si la figure disparaît – il faut déplacer \(S\) ou \(taille\)
Préférer ouvrir cette figure https://lc.cx/Lambert_G1_40_60 (plus grande) dans un nouvel onglet.
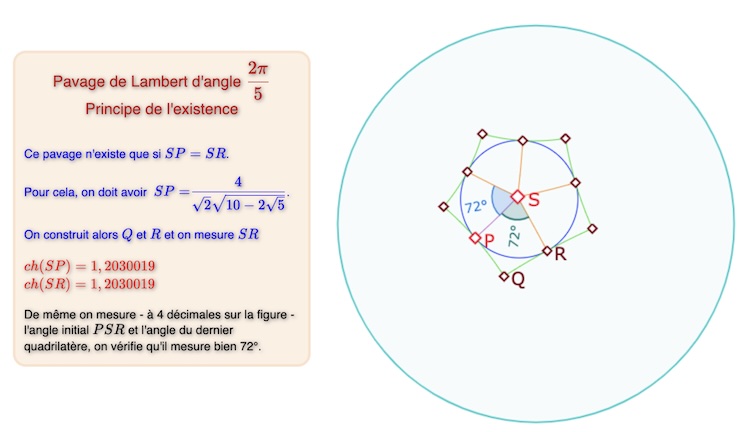
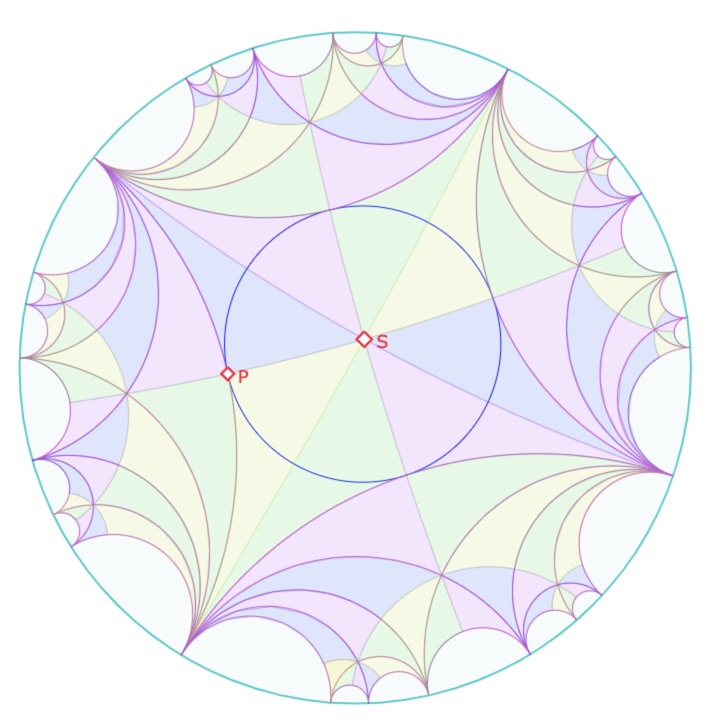
Le cas de l’angle aigu de \(\frac{2\pi}{5}\)
On propose une figure à part car il n’y a qu’un seul quadrilatère de Lambert qui réalise ce pavage, celui où les côtés de l’angle \(S\) sont égaux (\(SP=SR\)), et donc les deux autres aussi sont égaux (\(PQ=QR\)). Pour cela, on doit avoir \(SP=\displaystyle \frac{4}{\sqrt{2} \sqrt{10-2\sqrt{5}}}\).
Ouvrir cette figure de travail https://lc.cx/Lambert72_Intro dans un nouvel onglet.
On remarquera que le cercle solution est le cercle inscrit d’un pentagone orthogonal, et donc ce pavage de quadrilatère de Lambert d’angle 72° aurait pu se construire à partir du pavage de pentagones orthogonaux. La démarche de cet article montre que c’est la seule solution possible.
La génération 2 de ce pavage
On utilise désormais les remplissages de polygones hyperboliques comme développé dans différents articles précédents. La construction s fait simplement par des symétries orthogonales. On peut alors systématiser la construction par des macros intermédiaires.
Dans la figure suivante, on peut déplacer le point \(S\) pendant l’animation. Du point de vue dynamique – pendant l’animation – il y a quelques soucis d’orientation dans la construction initiale, d’où quelques sauts dans la figure.
Préférer ouvrir cette figure https://lc.cx/Lambert72_G2 dans un nouvel onglet.
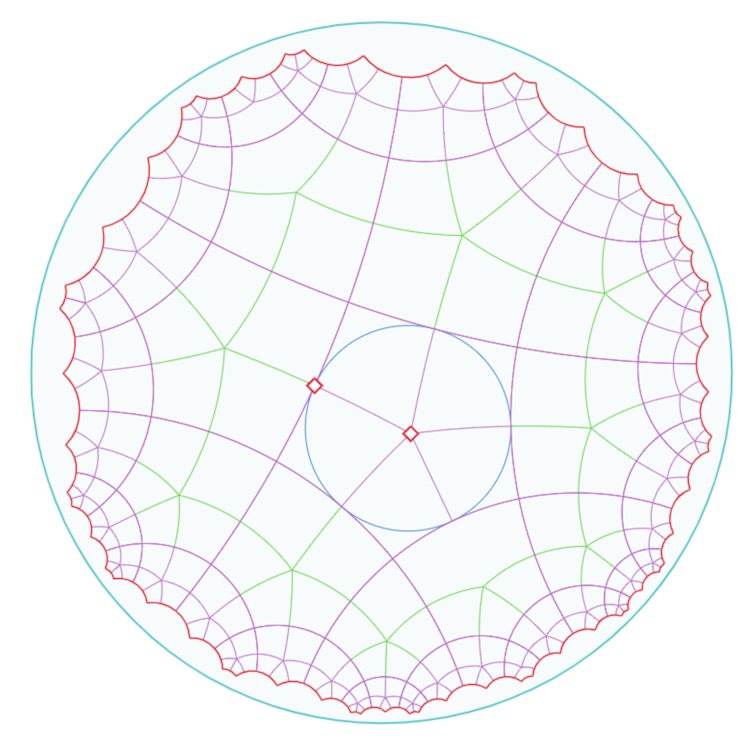
La génération 3 de ce pavage
La figure est très belle, mais trop longue à charger pour la mettre dans la page de l’article.
On peut ouvrir cette figure https://lc.cx/Lambert72_G3 dans un nouvel onglet. Compter environ 30 s pour l’ouverture avec un processeur rapide de 2026.
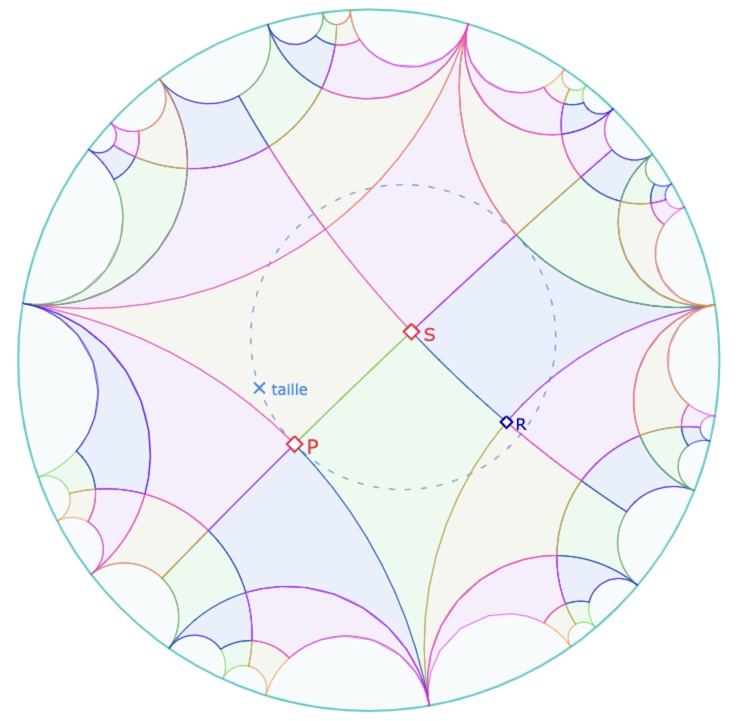
Génération 2 pour \(\theta=45°\) ou \(\theta=60°\)
Cas \(\theta=45°\)
Comme pour la figure de la génération 1, le point \(taille\) est aimanté par le cercle qui réalise \(SR=SP\).
Penser à tester aussi les cas très particuliers suivants :
• quand le point \(taille\) s’approche de l’horizon. Alors les trois points \(P, Q, R\) vont vers l’infini.
• quand le point \(taille\) se rapproche du cercle de rayon \(\Delta(45°)\), alors \(P\) reste à distance finie et \(Q\) et \(R\) vont à l’infini ; ls quadrilatères de Lambert se transforment en triangles idéaux.
Penser aussi à déplacer le point \(S\)
Préférer ouvrir cette figure https://lc.cx/Lambert45_G2, plus grande, dans un nouvel onglet.
Cas \(\theta=60°\)
La même chose pour avoir 6 quadrilatères de Lambert autour de \(S\), avec les mêmes conseils d’utilisation.
Préférer ouvrir cette figure https://lc.cx/Lambert60_G2 dans un nouvel onglet.
Variations « idéales »
Deux options dans cette section, une sur le cas limite où latex]Q[/latex] et latex]R[/latex] sont à l’infini, et l’autre quand ces deux points restent à distance finie.
Quand le quadrilatère de Lambert se déforme en triangle idéal
Quand on rapproche, comme suggéré ci-dessus le point \(P\) du cercle de rayon \(\Delta(\frac{\pi}{4})\), on ne peut pas atteindre le cercle, sinon la figure disparaît, on arrive à des configurations comme celle-ci par exemple :
Quand \(P\) et \(Q\) se rapprochent de l’infini
Dans cette illustration, le quadrilatère de Lambert existe encore. La droite \((PQ)\) est la perpendiculaire commune à deux autres côtés du quadrilatère, perpendiculaire commune qui tend vers l’infini. On se rappelle que c’est cette question de la perpendiculaire commune tendant vers l’infini qui avait conceptuellement arrêté Saccheri dans l’exploration approfondie du quadrilatère qui porte son nom et lui avait fait conclure que « cela nuit à la nature de la droite » dans son ouvrage Euclide lavé de toute tâche publié en 1733.
On peut s’amuser à construire la figure avec \(P\) effectivement sur le cercle de rayon \(\Delta(\frac{\pi}{4})\). Alors, bien entendu, les points \(P\) et \(Q\) n’existent plus, les quadrilatères de Lambert devenant des triangles idéaux d’angles 45° et 90°, le pavage de Lambert devient un pavage de triangles idéaux, ce qui donne, pour la génération 3 :
Ouvrir et manipuler cette figure https://lc.cx/Lambert_VarTRIdeal45 dans un nouvel onglet.
Cas d’un quadrilatère de Lambert idéal
Cette fois on conserve un quadrilatère de Lambert – soit trois angles droits – et un sommet idéal, c’est-à-dire que l’angle aigu est de mesure nulle. La construction ne pose aucune difficulté. Elle se fait essentiellement avec des symétriques. Voici une illustration de la génération 3.
Ouvrir et manipuler cette figure https://lc.cx/Lambert_Ideal_G3 dans un nouvel onglet.